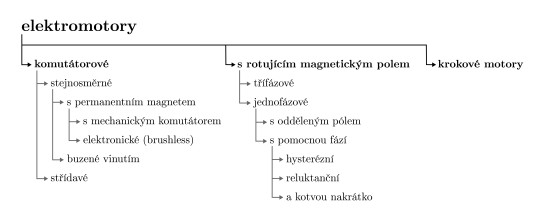
Elektromotory jsou stroje přeměňující elektrickou energii na energii mechanickou. U elektromotorů na střídavý proud je toho obvykle dosaženo točivým magnetickým polem rotačního magnetu.
Dle způsobu napájení se dělí na:
- třífázové – stator složený ze tří cívek napájených třífázovým proudem vytváří rotační magnetické pole,
- jednofázové.
Dle konstrukce se dělí na:
+
Poznámka
V této přehledové kapitole se detailněji seznámíme jen s těmi motory, se kterými se setkáme v promítací technice. Ostatní typy motorů jsou zde zmíněny pouze pro úplnost kapitoly.
Základní pojmy:
Skládá se ze statoru tvořeného permanentním magnetem a rotoru tvořeného elektromagnetem, na kterém jsou navinuté cívky. V případě, kdy se polarita proudu protékajícího cívkami rotoru bude shodovat s polaritou permanentního magnetu, který je cívce nejblíže, bude se cívka s magnetem vzájemně odpuzovat. Tím dojde k vytvoření momentu síly. Ve středu rotoru se nachází komutátor rozdělený na několik vzájemně izolovaných elektrod, na něž je připojen vždy jeden z přívodů zdroje. Při otočení rotoru dochází současně k otáčení elektrod a tím i k pravidelným změnám polarity proudu na cívkách (tzv. komutace). Na animaci 2 je znázorněn nejjednodušší příklad, kdy je rotor (a tedy i komutátor) tvořen pouze třemi sekcemi.
Animace 2. Princip stejnosměrného komutátorového elektromotoru
Zajímavost
U elektromotoru tvořeného dvěma sekcemi by mohla nastat situace, kdy by byl rotor otočen přesně ve střední poloze, čímž by nedošlo k jeho roztočení z důvodu chybějícího přívodního napětí na komutátoru. Také síly působící na cívku rotoru by byly v rovnováze. Proto se rotor (a tedy i komutátor) skládá nejméně ze tří sekcí. Při větším počtu sekcí rotoru je jeho chod rovnoměrnější.
Nevyužívá mechanický komutátor. Základ tvoří čtveřice cívek a ložisko, na kterém je magnet. Magnet je rozdělen do čtyř sekcí, má tedy dva severní a dva jižní póly. Proti každé sekci je cívka. Každá z cívek je napájena stejnosměrným napájecím napětím. Protilehlé dvojice cívek jsou spínány přes vlastní tranzistor. Za jejich řízení je zodpovědná Hallova sonda. Ta je součástkou měřící magnetické pole. Otáčením ložiska s magnetem dochází k vytváření řídícího proudu bází obou tranzistorů. Magnetické pole magnetu je tedy zodpovědné za přepínání tranzistorů, které napájí cívky. Počet polí závisí na konstrukci motoru a může jich být více, viz obr. 17. Tyto motory zpravidla nalezneme u chladících ventilátorů výpočetní techniky.
![17. Bezkartáčový (brushless) elektromotor. Zdroj: [22]](image/small/img018.jpg)
Obr. 17. Bezkartáčový (brushless) elektromotor. Zdroj: [22]
Konstrukce sestává z cívky, magnetu se dvěma póly a rotorem s komutátorem. Díky rozdělení cívky na statorovou a rotorovou je možné obvod různě zapojovat. V případě zapojení do série (motor se sériovým buzením) bude mít při nízkých otáčkách velký moment, neboť cívkami protéká velký proud. Pokud budou cívky napájeny konstantní hodnotou proudu z cizího zdroje (motor s cizím buzením), je závislost momentu na hodnotě otáček menší. Podobné chování vykazuje i paralelní zapojení cívek (motor s paralelním buzením / derivační motor). Pokud se cívky zapojí sério-paralelně (motor se sériově-paralelním buzením / kompaudní motor), je možné poměrem závitů na obou cívkách ovlivňovat i záběrovou křivku.
Je podobné konstrukce jako komutátorový stejnosměrný motor (s kotvou tvořenou více sekcemi, viz poznámka výše a obr. 18). Oproti němu je však stator tvořen elektromagnetem. Napájení statoru a rotoru se periodicky mění podle přívodního střídavého proudu. V každém okamžiku tedy dochází k vzájemnému odpuzování částí elektromagnetu rotoru s elektromagnetem statoru. Střídavý motor nelze napájet stejnosměrným napětím, neboť impedance cívek je navržena pro provoz při střídavém napětí, motor by se tedy mohl nenávratně zničit, více v poznámce níže.
Poznámka
Při průtoku střídavého proudu vykazuje cívka statoru kromě elektrického odporu také induktivní reaktanci (ta je dána změnami magnetického pole, jedná se o jalovou složku odporu). Při průtoku stejnosměrného proudu cívka statoru vykazuje pouze elektrický odpor, magnetické pole je statické. Skutečný (činný) elektrický odpor cívky statoru elektromotoru pro střídavý proud je tedy menší než odpor cívky statoru elektromotoru pro stejnosměrný proud. Při napájení komutátorového motoru určeného pro střídavý proud stejnosměrným proudem proto může dojít k velkému zahřátí cívek. Řešením je univerzální komutátorový elektromotor, který lze napájet oběma druhy proudu.
![18. Komutátor střídavého motoru. Zdroj: [24]](image/small/img019.jpg)
Obr. 18. Komutátor střídavého motoru. Zdroj: [24]
Konstrukce se dělí na synchronní a asynchronní. U synchronního motoru tvoří stator tři cívky napájené třífázovým proudem. Magnetické pole statoru je díky pohybujícímu se rotoru rotující. Rotor kromě otočného mechanismu tvoří i cívka, která po přivedení stejnosměrného proudu je stále přitahována magnetickým polem. Rotor je tedy unášen vnějším magnetickým polem. Otáčky motoru jsou tedy dány kmitočtem elektrické sítě (v základu 50 otáček za sekundu, tedy 3000 otáček za minutu), počtem cívek ji lze upravovat.
Stator asynchronního motoru je opět tvořen z cívek vytvářející rotující magnetické pole. V drážkách plechů je vytvořena klec nakrátko. V tomto vinutí se vlivem působení střídavého magnetického pole indukuje elektrické napětí a tedy i elektrický proud. Rotor je tedy unášen tímto magnetickým polem. Vlastností motoru je, že se rotor musí vždy točit pomaleji než magnetické pole. Pokud by se točil stejně rychle, neindukovalo by se v kleci žádné elektrické napětí a netekl by tedy žádný proud. Rozdíl se označuje jako skluz. Tyto motory vyžadují regulaci výkonu, aby se předešlo toku velkých proudů při zapnutí motoru.
Elektromotor s odděleným pólem z hlediska konstrukce sestává z jedné statorové cívky, rotoru a odděleným závitem nakrátko (celkem 1/3 cívky). Ten je zodpovědný za zpožďování magnetického pole a vznik rotačního pole. Pokud tedy motor stojí a na oddělený závit přivedeme elektrický proud (např. z kondenzátoru), dojde k posunutí fáze, vzniku rotačního pole a tedy roztočení motoru navzdory tomu, že je motor napájen pouze jednou fází. Při rozběhu je potřeba, aby proud odděleným závitem byl vyšší, proto se často kondenzátory využívají dva – jeden připojený trvale a druhý připojovaný jen při rozběhu. Tento typ motoru nalezneme jako hlavní pohonný elektromotor v promítacím stroji MEO 5, ale také jako elektromotor radiálního ventilátoru xenonové výbojky v lampové skříni a jako motory v převíjecím stole.
Sestává z rotoru, kde magnetický obvod je válcový, hladký z vysoce koercitivní kobaltové oceli. Tento materiál při magnetizaci vyžaduje k obrácení pole velké magnetické pole, jde tedy o magneticky tvrdý materiál. Rotující pole statoru způsobuje, že rotor je vystaven obráceně orientovanému magnetickému poli. Díky hysterezi tedy zaostává fáze magnetického pole v rotoru za magnetickým polem statorovým. Zaostáváním se vytváří kroutící moment a vzniká dvoupólový magnet. Rotor se blíží rychlostí otáčení statorovému magnetickému poli, které dosáhne při vyšší vysoké rychlosti. Výhodou je jeho konstantní moment otáčení nehledě na rychlost otáčení a také přesná konstantní rychlost. Tento typ motoru nalezneme jako elektromotory odvíjecí a navíjecí jednotky v promítacím stroji MEO 5.
V jádře má vytvořené dutinky, jejichž počet je různý (aby se nemohly nacházet proti sobě), viz obr. 19. Velikost vzduchové mezery v magnetickém poli je při vyrovnání pólů s magnetickým polem statoru minimální. Vzniká tak kroutící moment, který rotoru umožňuje srovnat své magnetické pole s magnetickým polem statoru. Jde tedy o synchronní motor, který se podobně jako hysterezní motor při synchronních otáčkách uzamyká k magnetickému poli statoru. Aby se motor rozběhnul, je zpravidla vybavený vinutím nakrátko po vzoru asynchronního motoru.
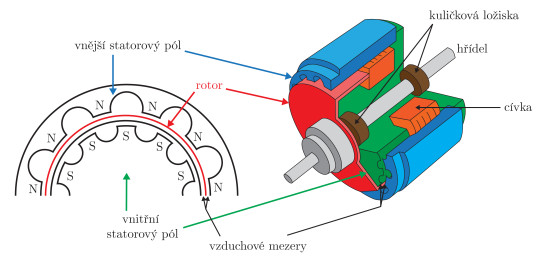
Obr. 19. Konstrukce statoru a rotoru (vlevo) s celkovým řezem (vpravo)
Předpokladem je stejnosměrné napájení. Sestává z permanentního magnetu a cívek, které se napájí přepínačem. Jakmile je napájena jedna z cívek, je motor přiměn k otočení a tedy srovnání vlastního magnetického pole s magnetickým polem cívky. Napájení cívek je tedy přepínáno a otáčení rotoru je tedy krokové, o přesně dané úhlové velikosti. Permanentní magnet může být vybaven více póly tak, aby se zvýšil počet poloh (a tedy kroků), které rotor vykoná na jednu otáčku o 360 ° (viz ozubené kolečko na obr. 20). Je ideální pro řízení mikroprocesorovou technikou například pro ovládání oponového zařízení. Lze totiž snadno vypočítat, o jakou vzdálenost se opona posune, pokud do krokového motoru pošleme známý počet pulsů.
![20. Krokový motor. Zdroj: [23]](image/small/img021.jpg)
Obr. 20. Krokový motor. Zdroj: [23]