5.1
Základní vlastnosti filtrů FIR
Výraz (16) představuje polynom v mocninách
. Přenosovou funkci filtru FIR v závislosti na frekvenci získáme dosazením
:
.
5.1.1
Lineární fáze
Lineární fázová charakteristika filtru FIR vyplývá z přenosové funkce jako její argument:
. (17)
Otázkou nyní je, jak ovlivní tvar impulsní odezvy
lineární fázovou charakteristiku filtru FIR. Konstanta
je konstanta úměrnosti fázové charakteristiky. K tomu, aby měl filtr FIR lineární fázi, musí mít symetrickou impulsní charakteristiku. Symetrická impulsní odezva je běžná pro návrhové postupy filtrů FIR. Existují dva typy symetrií:
- sudá symetrie,
- lichá symetrie.
Zde se zaměříme pouze na sudou symetrii, pro kterou platí vztah:
. (18)
Vztah (18) udává, že impulsní odezva je symetrická ke svému středu symetrie M. Zde mohou nastat dva typy impulsních odezev FIR filtru. Filtr typu 1 má lichý počet členů N impulsní odezvy a typu 2 sudý počet členů. Pro typ 1 je osou symetrie vzorek
, pro typ 2 leží osa symetrie mezi vzorky
a
. Oba typy sudé symetrií jsou znázorněny na obrázku 27.
+
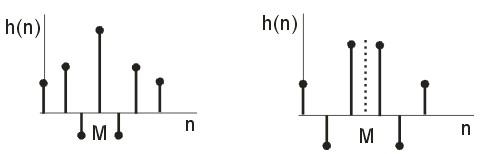
Obr. 27. Impulsní odezva filtru FIR s lineární fází a) typ 1 – sudá symetrie, N liché, b) typ 2 – sudá symetrie, N sudé
5.1.2
Stabilita filtru FIR
Z rovnice (16) je patrné, že přenosová funkce filtru FIR je polynom, a proto nemá póly, ale jenom nuly. Filtr FIR je tudíž vždy stabilní, a proto není nutné při návrhu filtrů FIR brát zřetel na stabilitu. Abychom dokázali lépe porozumět vztahu mezi tvarem přenosové funkce a polohou nulových bodů filtru FIR v z-rovině, uvedeme zde několik závislostí. Přenosová funkce filtru FIR délky
je dána již známým vztahem pro mocniny
:
.
Výraz pro přenosovou funkci mžeme upravit vytknutím
do tvaru:
.
Ze vztahu vyplývá, že přenosová funkce
má
-násobný pól v počátku
-roviny. Vzhledem k tomu, že koeficienty filtru
jsou reálné, budou nulové body reálné nebo komplexně sdružené. Pro filtr FIR s lineární fází, který má symetrickou impulsní odezvu
platí:
.
a
jsou reciproční polynomy. To znamená, že pokud je kořen
nulovým bodem přenosové funkce
, je nulovým bodem této funkce též kořen
. Nulový bod
budeme obecně uvažovat jako komplexně sdružený
a
. Pokud nulový bod existuje na poloměru
, pak nulový bod také existuje na poloměru
. Takže existuje speciální symetrie nulových bodů podle jednotkové kružnice. Další možná poloha nulových bodů filtru FIR je přímo na jednotkové kružnici, kdy
. Na obrázku 28 je znázorněno možné umístění nulových bodů filtru FIR. Obecně lze říci, že nulové body souměrné k jednotkové kružnici ovlivňují chování filtru v propustném pásmu, nulové body na jednotkové kružnici v nepropustném pásmu.
+
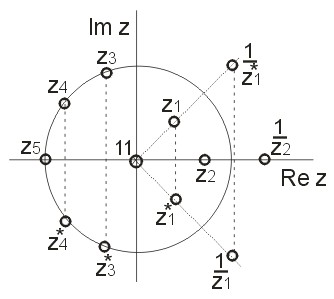
Obr. 28. Poloha nulových bodů filtru FIR
5.1.3
Implementace filtru FIR
Dříve než uvedeme transverzální strukturu filtru FIR, popíšeme prvky, ze kterých se struktury filtrů FIR a také IIR skládají. Základní schématické prvky jsou uvedené na obrázku 29. Na obrázku 29 a) je uveden sčítací blok, která provádí součet signálů, které do něho vstupují. Zde je to součet signálů
. Tomuto bloku se říká sčítačka. Na obrázku 29 b) je uvedena násobička.
+
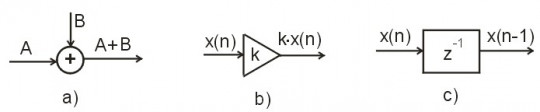
Obr. 29. Základní schématické prvky pro implementaci filtrů a) sčítačka, b) násobička, c) blok posuvu
Signál, který do násobičky vstupuje, je násoben konstantou uvedenou v těle násobičky. V našem případě je výstup násobičky
. Dalším prvkem pro konstrukci schémat filtrů je blok zpoždění signálů, znázorněný na obrázku 29 c). Signál, který do bloku vstupuje, je posunutý o jeden vzorek, zde
. Nyní již můžeme nakreslit schéma filtru FIR. Pro jednoduchost zvolíme řád filtru
. Diferenční rovnice třetího řádu zní:
.
Blokové schéma realizujeme tzv. transverzální strukturou znázorněné na obrázku 30, která přepisuje diferenční rovnici do schématu.
+
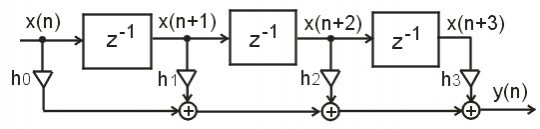
Obr. 30. Transverzální struktura filtru FIR třetího řádu